小昆虫, 大启发, 用于粗糙壁面的驱动不足的自适应微棘夹持器
许多生物,从蚂蚁和蟑螂等小型昆虫到猫和鹰等大型动物,都能在粗糙的墙壁上附着。
它们通过爪子上的微棘与粗糙表面上的小突起互锁来实现这一点。
这种能力不仅在自然界中普遍存在,在人类生活中也有广泛应用。
我的团队研究了自由行走甲虫爪子与砂纸之间的切向附着行为,重点探讨了爪尖尺寸与粗糙度之间的关系。
研究发现,这种附着方式对多尘、粗糙表面具有极佳的适应性,这在自然界和人类环境中都很常见。
仿生设计的灵感
我们的灵感来自犀牛甲虫(鞘翅目:Phileurus didymus)的爪子。

这种甲虫凭借其脚关节的适应性,能够很好地附着在粗糙的墙壁上,并且可以反向牢牢抓取。
我们设计了一种夹持器,将微棘排列成八个微棘盒的圆形阵列,每个微棘盒包含10个微脊柱。
这些微棘粘合到柔性结构上,由丝杠螺母机构驱动。
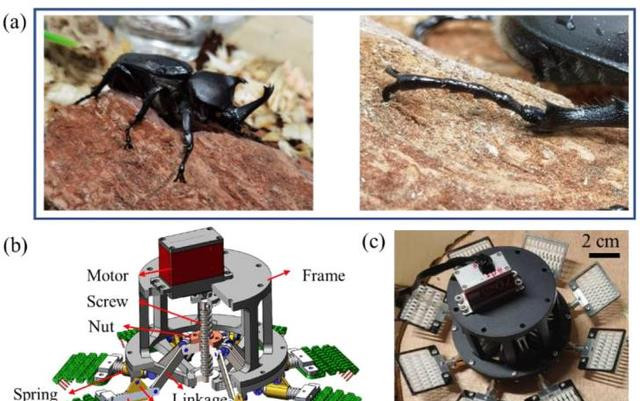
整个夹持器仅由一个电机驱动,可以同时实现附着和分离。
微棘的设计与制造
微棘的结构对附着性能至关重要。
理论上,脊尖半径越小,对粗糙度较小的表面的适应性越强。

然而,脊尖半径越小,强度也越低,单个脊柱能承受的最大附着力也会受到限制。
此外,尖端容易磨损、塑性变形,甚至断裂,这会降低微刺的附着力。
为了增加刺的强度和耐磨性,我们使用不锈钢制成微棘,并在其表面镀铬。

商用针的针尖形状为三角形圆锥,针柄直径约0.7毫米,针尖锥角约24°,针尖半径10微米至20微米。
当微棘抓住墙壁时,它会滑动一定距离,直到遇到合适的粗糙峰值。
这个过程会导致微棘的尖端磨损,曲率半径增大,约为40微米至60微米,从而降低其锁定粗糙峰的能力。
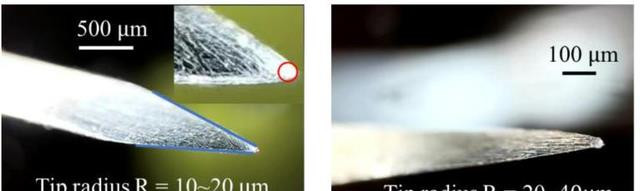
因此,整个微棘的性能也会受到影响。
柔性结构的重要性
柔性结构主要用于提高微棘对粗糙壁面的适应性,使不同微棘的负荷尽可能均匀分布,共同承受正常和切向粘附,避免单个微棘因过载而受损。
- 均匀分布整体切向力和法向力,避免损坏单个脊柱并防止“剥离”故障。
- 在相邻的棘之间提供足够的独立性,使每个脊柱都能找到并定居在自己的粗糙度上,而不影响或受到其邻居的影响。
- 保持每个脊柱的方向,使其不会随着负载的增加而滑落。
- 适应脊柱阵列和墙壁之间的对齐误差,并适应墙表面的局部曲率。
为了满足这些要求,研究人员尝试了多种灵活的结构制备方案。
Asbeck等人利用形状沉积制造(SDM)技术,通过多组分成型制作出具有非线性刚度的柔性结构,并建立了弹簧杆模型来分析其力学行为。
然而,SDM制造的柔性结构强度低,成本高。

Parness等人根据小行星附着和采样要求,用激光切割方法制作了多种柔性结构。
Liu等则利用选择性激光烧结(SLS)快速成型,模仿节肢动物的适应特性,制成锯齿形柔性结构。
我们的团队采用立体光刻外观(SLA)法制备了类似的柔性结构,并根据需要进行了优化。
打印材料采用Future 8200 Pro材料,具有良好的韧性和高印刷质量。
力学性能分析
在确定柔性结构设计尺寸的过程中,我们首先选择了三种结构,并通过有限元仿真计算了刚度矩阵。
刚度矩阵表示施加到针尖的载荷与其位移之间的关系。
- Kxx应适中,使柔性结构既能满足水平张拉方向上变形大于墙面平均粗峰间距的要求,又能承受较大的荷载。
- KYY应较小,以满足微脊柱对毫米级壁几何形状的适应性。
- KXY应小于零,在附着阶段,锚定粗糙峰后,给剩余的微棘一个力,继续接近壁,使尽可能多的微棘能够很好地接触壁,锚定合适的粗糙峰。

有限元分析在Comsol Multiphysics 6.0中进行,单位长度的位移分别施加到针尖上,并计算作用在针尖上的力。
刚度矩阵被视为线性系统,刚度矩阵是对角对称矩阵。
自动筛选机制
柔性结构的锯齿形装配可以实现正向和切向柔性,其刚度系数可以通过标注的尺寸进行调整。
在抓取过程中,微脊柱的尖端在壁上水平滑动,以找到合适的粗糙峰。
当它遇到粗糙的峰值时,会承受水平方向的力,导致微棘的角度偏转,这会使微棘更容易跳过粗糙的峰值。
此机制称为自动筛选,可以在抓取之前过滤掉那些不可靠的粗糙峰,从而使微脊柱找到足够可靠的粗糙峰进行附着。

此外,微脊柱在受到切向力后,有远离壁的趋势,这表明微脊柱锚定后,它将驱动其他微棘接近墙壁。
在提升和装载的过程中,微脊柱的尖端将承受来自墙壁的法向力,切向力也会增加。
此时,这两个方向的力会使微脊柱的角度尽可能恢复到初始状态,这将提高微脊柱尖端与抓握后的粗糙峰之间的接触可靠性。
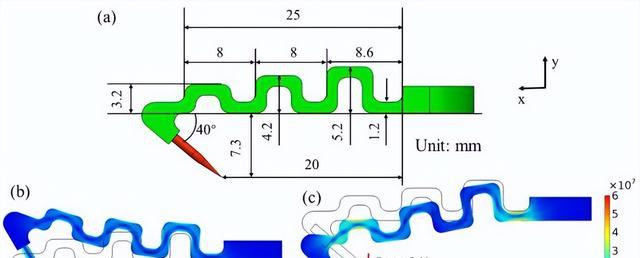
应力浊度的最大应力约为50 MPa,发生在连接根部。
但在实际使用中,应力通常不会超过此负载,即使在某些特殊情况下发生过载,单个柔性结构断裂也不会对整体粘合性能产生显著影响。
性能测试
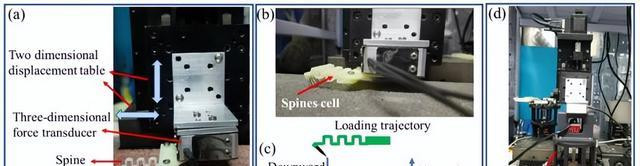
为了充分了解微棘夹持器的性能,我们设计了一个测试台,用在三个级别上测试单个微脊柱、微脊柱单元和夹持器。
二维运动台用于实现水平和垂直运动,微棘单元通过三维力传感器安装在位移台上,可以监测针尖在连接过程中接收到的三向力。
连接的壁放置在平台上,并用限位螺钉固定。
整个实验装置建立在光学平台上,单个微脊柱和微脊柱模块的测试过程基本相同,模块可以在安装过程中直接更换。

测试夹持器时,将其安装在力传感器下方。
在每个实验中,夹持器首先抬起微脊柱的单脚,垂直位移台向下移动,使可移动微棘的顶丝接触墙面。
然后正常的接触力可以自动判断是否接触,接触完成后,使用夹具进行驱动和抓取。
最后,垂直位移台向上移动,将夹具从壁上拉开,并测量峰值附着力。
应用前景
基于昆虫的仿生附着,我们提出了一种仿生微棘抓手。
夹持器采用轴对称设计,结合仿生柔性结构和欠驱动联动机构,实现了对壁面粗糙度和几何形状的被动适应。
使用驱动电机,它可以适应毫米级到厘米级的表面粗糙度,使用80个微棘实现超过60 N的正常粘附和超过30 N的切向粘附。
具有柔性结构和欠驱动连杆机构的刚柔耦合模型可以有效提高微棘在各种工况下的粘附性能,为微棘的设计提供了理论指导。
这种仿生微棘抓手不仅可以应用于工业领域,如机器人抓取和攀爬,还可以用于医疗设备、航空航天等领域。
未来,我们将继续优化设计,探索更多应用场景,为人们的生活带来更多便利。
1. 罗德里克 W.R.,钦 D.D.,卡特科斯基 M.R.,伦丁克 D. 鸟类通过调整接触时的脚面相互作用,可靠地降落在复杂的表面上。
生活。
3. 伯克迈耶 P.,吉利斯 A.G.,害怕 R.S. 冲突:攀爬垂直松布;2011年IEEE/RSJ智能机器人与系统国际会议论文集;美国加利福尼亚州旧金山。
4. 迪克森 J.D.,克拉克 J.E. 多模式爬升和滑翔机器人平台的设计。
5. 宾纳德M.,卡特科斯基M.R.分层制造组合设计。